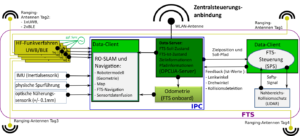
Self-adaptive radio-based indoor/outdoor positioning for resilient driverless transport systems is the name of the current R&D cooperation project funded by the ZIM Central Innovation Program for SMEs of the German Federal Ministry for Economic Affairs and Energy. Together with the project partners Beldrive Engineering GmbH, www.beldrive.com, Deveritec GmbH, www.deveritec.com and the TU Dresden; Institute for Transport Telematics (www.tu-dresden.de/vkw/itvs), a conventional, lane-guided automated guided vehicle (AGV) is to be converted into a self-navigating AGV, without mechanical lane shifting. The aim is to make the sensor technology of the AGV so resilient that optimal navigation in industrial production environments can be realized for indoor, outdoor and their transition areas. For this purpose, two RF measurement methods (UWB & BLE), a virtual odometry and an intelligent SLAM-enabled navigation algorithm are developed and combined in a sensor data fusion. Due to the dynamic generation of ranging subnets and self-sustained organization, application areas can be easily extended by additional setup of radio anchors. Route area and spear areas can be quickly learned by teach-in. Overall, this results in greater flexibility and operational reliability for AGVs. Metirionic will develop a combined BLE distance and angle measurement method.
iops Architecture ©